St&oouml;rungen am CAN(-FD)-Bus durch galvanische Trennung
1. Problem galvanische Trennung mit Magnetkoppler, Beispiel ADUM1201B
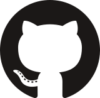
Häufig wird bei der galvanischen Trennung ein iCopler von Analog Devices verwendet. Die Schaltung 1 zeigt eine Standardbeschaltung mit einem ADUM1201B und einem PCA82C251T von NXP.
Das Problem besteht darin, dass der ADUM1201B beim Abschalten einen kurzen „Low“-Impuls auf der Sekundärseite erzeugen kann und – vorausgesetzt der CAN-Transceiver wird noch mit ausreichend Strom versorgt – einen dominanten Pegel am Bus ausgibt.
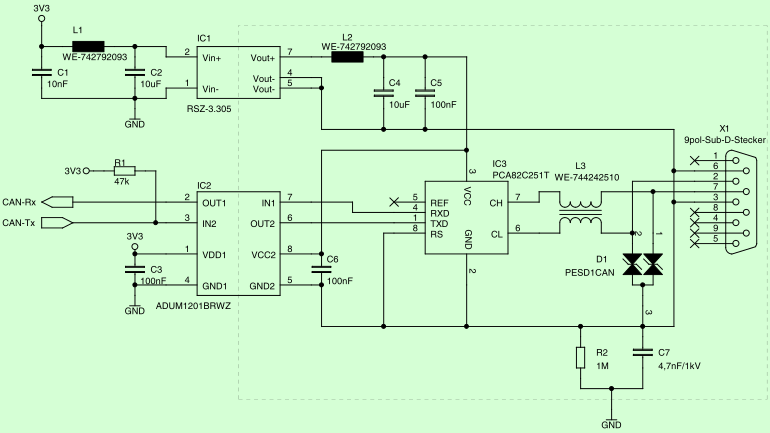
Versuchsschaltung mit ADUM1201B
|
|
||||||||||||||||
Die Logiktabelle zeigt das Ergebnis unserer Versuchsschaltung. Der ADUM1201B generiert zwischen 1,7 und 1,6 V an VDD1 und IN2 ein „Low“-Signal am Ausgang OUT2. Mit 0,1 V ist das Fenster, in dem ein Fehler auftreten kann, sehr klein, außerdem gibt es von Bauteil zu Bauteil sehr große Toleranzen. Was tatsächlich passiert, hängt von vielen Faktoren ab. Je langsamer jedoch die Spannungsversorgung beim Abschalten zusammenbricht, desto größer wird die Wahrscheinlichkeit eines Fehlers. Bei CAN-FD wird häufig der SI8621EC von Silicon Labs verwendet, der im Prinzip das gleiche Verhalten zeigt wie das Bauteil von Analog Device.
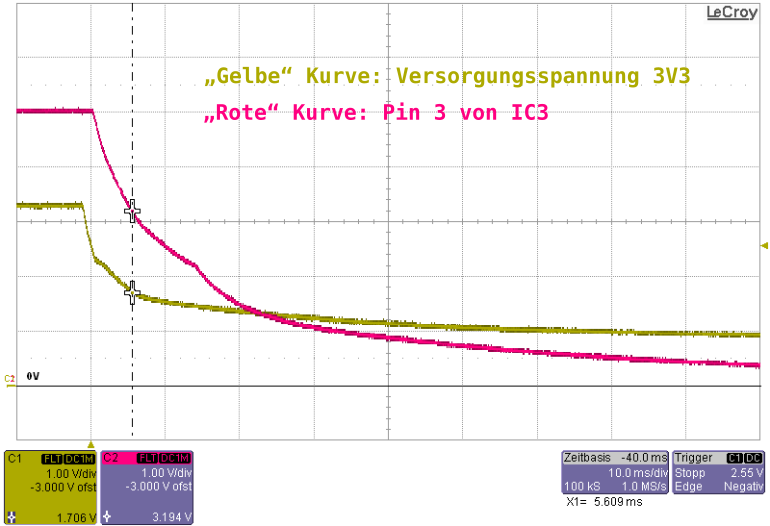
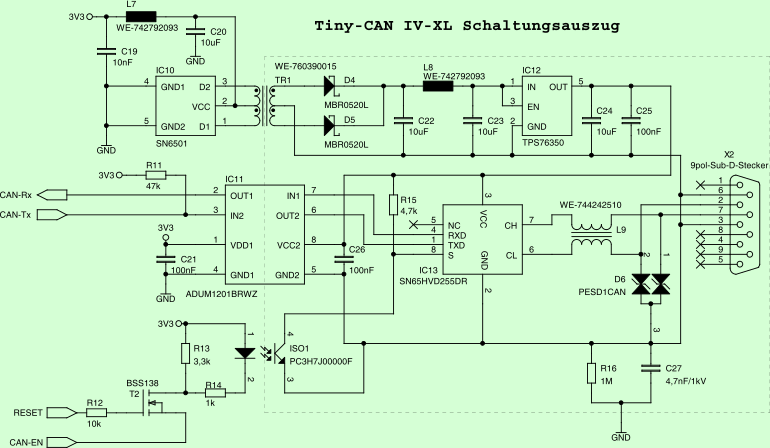
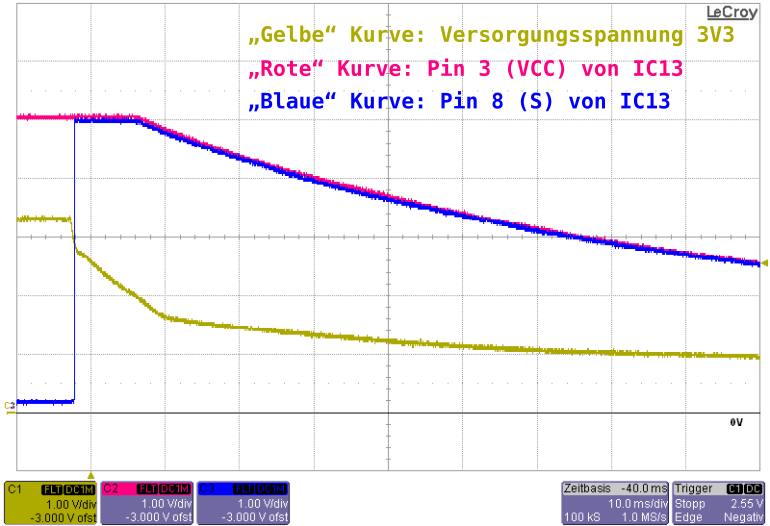
Das Oszilloskop zeigt die Spannungsverläufe beim Abschalten der Versorgungsspannung, bei unserem Versuch herrscht keine Aktivität am CAN-Bus. Primär 3,3 V die „gelbe“ Kurve und sekundär 5 V die „rote“ Kurve. Die Markierung ist bei 1,7 V primär, während der PCA82C251T immer noch mit 3,19 V versorgt wird. Der Schaltungsauszug aus dem Tiny-CAN IV-XL Modul (Schaltung 2) zeigt die Lösung des Problems. Der CAN-Transceiver IC13 wird über den Widerstand R15 in den „Silent Mode“ geschaltet. Der Optokoppler ISO1 wird nur durchgesteuert, wenn „RESET“, „High“ und „CAN-EN“ „Low“ sind, und versetzt den SN65HVD255DR in den Arbeitsmodus. Durch die Verknüpfung des „RESET“-Signals und des „CAN-EN“-Signals wird ein Maximum an Sicherheit erreicht. Das „CAN-EN“-Signal wird vom Mikrocontroller generiert und ist nur bei geöffnetem CAN-Device auf „Low“ gesetzt. R13 sorgt für ein schnelles Sperren des Optokopplers. R12 verhindert übrigens ein Rückwirken auf das „RESET“-Signal bei Schalten des „CAN-EN“-Signals. Der PCA82C251T wurde gegen den SN65HVD255DR von Texas Instruments ausgetauscht. Der CAN-Transceiver von NXP arbeitet beim Abschalten der Spannung nicht sauber, die Unterspannungserkennung des SN65HVD255DR löst dieses Problem. Abbildung 2 veranschaulicht die Funktionsweise der neuen Schaltung. Die „blaue“ Kurve zeigt das rechtzeitige Abschalten des CAN-Transceivers bei Einbrechen der Versorgungsspannung. Bricht die Versorgungsspannung (3,3 V) auf einen Wert von 3 V ein, wird der Optokoppler nicht mehr durchgesteuert und der „S“-Eingang des SN65HVD255DR wird „High“. Fazit: In den meisten Fällen stellt die in Abbildung 1 gezeigte Schaltung kein Problem dar. Die Störungen, die am Bus beim Abschalten der Versorgungsspannung auftreten, sind, wenn sie überhaupt vorkommen, von so kurzer Dauer, dass die Fehlerkorrektur des CAN-Busses ohne Probleme damit fertig wird. Nur in wenigen Ausnahmefällen ist der in Schaltung 2 gezeigte Aufwand empfehlenswert. Größter Nachteil ist hier der SN65HVD255DR von Texas Instruments, zweifelsohne ein sehr hochwertiges, jedoch überaus teures Bauteil. Eine Besonderheit ist, dass die „Driver Dominant Time Out“-Logik 10 kBit/s Übertragungsgeschwindigkeit unterstützt. Die Schaltung 3 für CAN-FD ist der vorherigen Schaltung 2 sehr ähnlich. Wie bereits erwähnt, kommt für die galvanische Trennung der SI8621EC von Silicon Labs zum Einsatz. Das Bauteil ist mit einer Datenrate von 150 MBit/s spezifiziert und hat ein gutes Preis-Leistungs-Verhältnis. Der verwendete CAN-FD-Transceiver TCAN1044V unterstützt Datenraten von 9,2 kBit/s bis 8 MBit/s, hat eine Unterspannungserkennung und ein gutes Preis-Leistungs-Verhältnis. Der SN6501 ist das teuerste Bauteil unserer Schaltung. In der neuen CAN-FD-Version wurde dieses Bauteil durch zwei Transistoren ersetzt, die direkt vom Mikrocontroller angesteuert werden. Voraussetzung ist, dass ein Controller mit entsprechender „Timer Unit“ zur Brückenansteuerung mit „Totzeit-Timer“ verwendet wird. In dem neuen Design verwenden wir keinen externen RESET-Controller mehr, die Abschaltung des CAN-Transceivers erfolgt ausschließlich über den Mikrocontroller, der die Versorgungsspannung selbst überwacht und bei Unterspannung den „CAN-EN“-Ausgang auf „High“ setzt. Natürlich wurde auch die Schutz- und Filterbeschaltung bestehend aus L8 und D6 für CAN-FD angepasst.
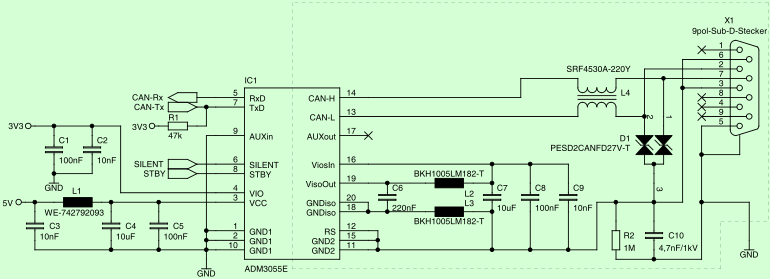
Der ADM3055E/57E von Analog Device vereint DC/DC-Wandler, galvanische Trennung und CAN-Transceiver auf einem einzigen SMD-Bauteil. Laut Datenblatt sollten beim Abschalten der Versorgungsspannung keine Probleme auf dem CAN-Bus auftreten. Ein kleiner Nachteil ist, dass das Bauteil 5 V Versorgungsspannung benötigt. Mit max. 12 MBit/s CAN-FD-Übertragungsrate stellt die Schaltung 4 den Geschwindigkeitsrekord unter den hier gezeigten Lösungen auf. Außerdem ist der geringe Platzbedarf auf der Leiterplatte ein großes Plus. Zweifelsohne ein Bauteil mit viel Charme, vom hohen Preis einmal abgesehen. Leider liegen uns keine Erfahrungswerte über die Zuverlässigkeit des ADM3055E/57E im industriellen Einsatz vor, für uns ist der hohe Preis ein Ausschlusskriterium.2. Galvanische Trennung mit „CAN-Safe“-Schutzbeschaltung
3. Die angepasste „CAN-Safe“-Schutzbeschaltung für CAN-FD

4. Anderer Lösungsansatz mit ADM3055E/57E