CAN IO 3 - Digital/Analog CAN-FD I/O Baugruppe
1 Funktion
Universal CAN FD I/O Baugruppe für raue Umgebungsbedingungen. Mit 6 Ein- und Ausgängen, 9 Multifunktionseingänge sowie 1 Analog-Eingang und 1 Analog-Ausgang. Die Konfiguration erfolgt über unser kostenloses Tool "MHS-CAN-Studio". Die Kommunikation mit dem PC findet über den CAN-Bus mithilfe eines Tiny-CAN Adapters statt.
1.1 Leistungsmerkmale
- CAN-Signal Editor mit Unterstützung für Muxer-Nachrichten und DBC-File Import
- Power-Down Mode mit CAN und Input Ereignis Wake-Up
- 2 High-Side 4A Ausgänge
- 4 High-Side 2A Ausgänge
- 9 Multifunktionseingänge mit zuschaltbaren Sink/Source-Current
1.2 Hardware

1.3 Downloads
 |
TinyCan.pdf CAN-USB-Adapter – Tiny-CAN Treiber Installation, Hardware Varianten & Software-Tools |
|
canio3_manual.pdf Dieses Dokument als PDF |
- CAN IO 3 Baugruppe
 |
Achtung: Das zur Programmierung benötigte "Tiny-CAN"-Interface ist nicht im Lieferumfang enthalten. USB-CAN-Adapter von Drittanbietern werden nicht unterstützt. |
2 Anschlüsse / Verdrahtung
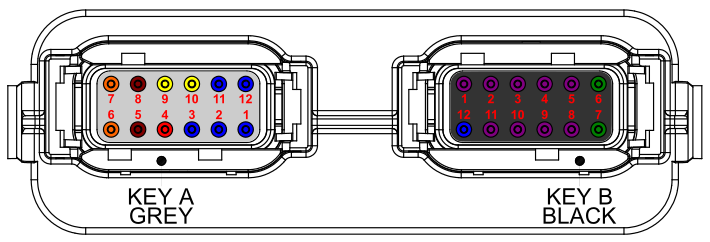
2.1 Steckerbelegung
Pin |
Farbe | Type | Bezeichner | Funktion | ||
| A | 1 |
|
DO-LP | OUT3 | 2A Power Ausgang*, auch als Digitaleingang nutzbar | |
| 2 |
|
DO-LP | OUT4 | 2A Power Ausgang*, auch als Digitaleingang nutzbar | ||
| 3 |
|
DO-LP | OUT5 | 2A Power Ausgang*, auch als Digitaleingang nutzbar | ||
| 4 |
|
PWR | KL30 | Versorgungsspannung | ||
| 5 |
|
GND | Masse | |||
| 6 |
|
CAN | CAN-L | CAN Bus Low Signal | ||
| 7 |
|
CAN | CAN-H | CAN Bus High Signal | ||
| 8 |
|
GND | Masse | |||
| 9 |
|
PWR | KL15-2 | + für OUT3 - OUT6 | ||
| 10 |
|
PWR | KL15-1 | + für OUT1 und OUT2 | ||
| 11 |
|
DO-HP | OUT1 | 4A Power Ausgang**, auch als Digitaleingang nutzbar | ||
| 12 |
|
DO-HP | OUT2 | 4A Power Ausgang**, auch als Digitaleingang nutzbar | ||
| B | 1 |
|
DI | IN1 | Digitaleingang | |
| 2 |
|
DI | IN2 | Digitaleingang | ||
| 3 |
|
DI | IN3 | Digitaleingang | ||
| 4 |
|
DI | IN4 | Digitaleingang | ||
| 5 |
|
DI | IN5 | Digitaleingang | ||
| 6 |
|
AI | A-IN | Analogeingang, 0 – 10 V oder 0 – 25 V | ||
| 7 |
|
AO | A-OUT | Analogausgang, 0 – 10 V | ||
| 8 |
|
DI | IN6 | Digitaleingang | ||
| 9 |
|
DI | IN7 | Digitaleingang | ||
| 10 |
|
DI*** | IN8 / BOOT2 | Digitaleingang | ||
| 11 |
|
DI*** | IN9 / BOOT | Digitaleingang | ||
| 12 |
|
DO-LP | OUT6 | 2A Power Ausgang*, auch als Digitaleingang nutzbar | ||
* = Gesamtstrom für OUT1 u. OUT2 maximal 7 A ** = Gesamtstrom für OUT3 – OUT6 maximal 5 A *** = Eingangspin mit doppelter Funktion, siehe dazu Kapitel: 5.5 Die BOOT Eingänge
2.2 I/O Typen
| Type | Beschreibung |
|
| PWR |
Versorgung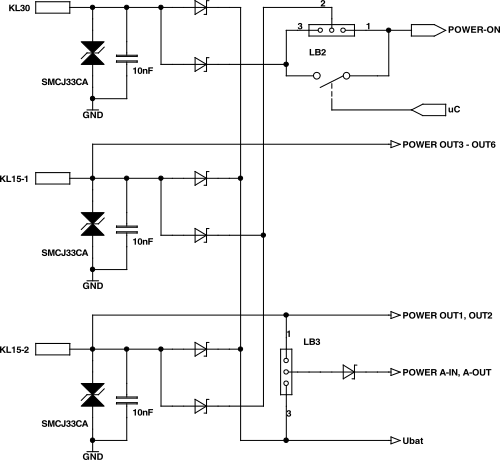
|
|
| CAN |
CAN Interface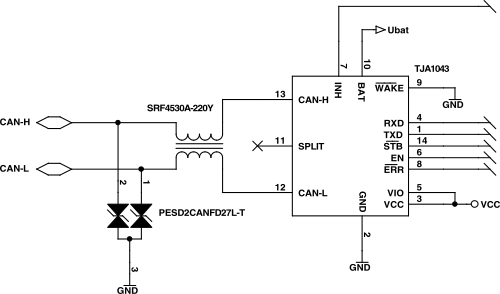
|
|
| DO-LP |
Low-Power Digitalausgang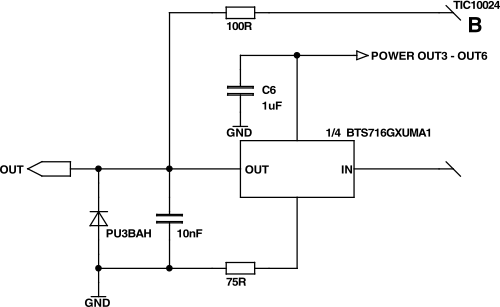
|
|
| DO-HP |
High-Power Digitalausgang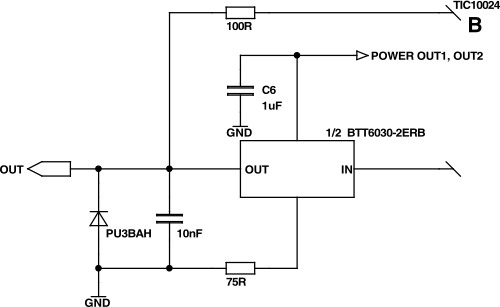
|
|
| DI |
Digitaleingang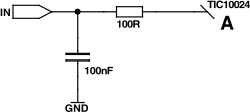
|
|
| AI |
Analogeingang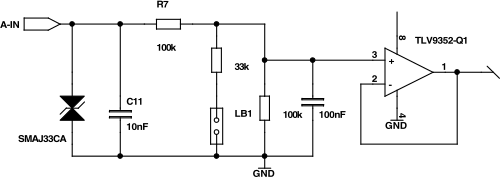
|
|
| AO |
Analogausgang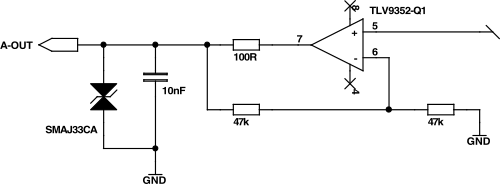
|
|
2.3 Digitale Inputs – TIC10024
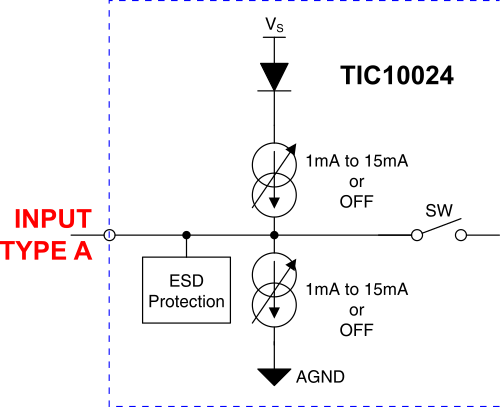
|
"Sink-Current", "Source-Current" von 0mA, 1mA, 2mA, 10mA, 15mA wie folgt in Gruppen programmierbar:
|
||||||
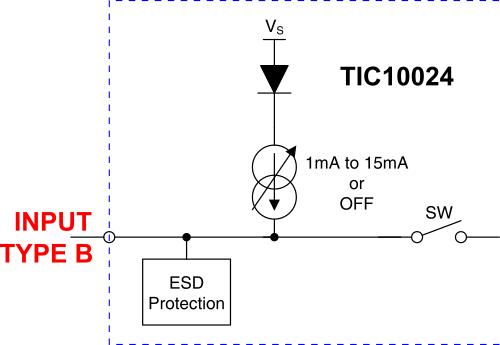
|
"Source-Current" von 0mA, 1mA, 2mA, 10mA, 15mA wie folgt in Gruppen programmierbar:
|
- Die Schwellspannung des Eingangskomperators des TIC10024 ist von 2 – 4 V in den Schritten 2 V, 2.7 V, 3 V, 4 V programmierbar.
- Jeder Digitaleingang kann als "WakeUp" Pin konfiguriert werden.
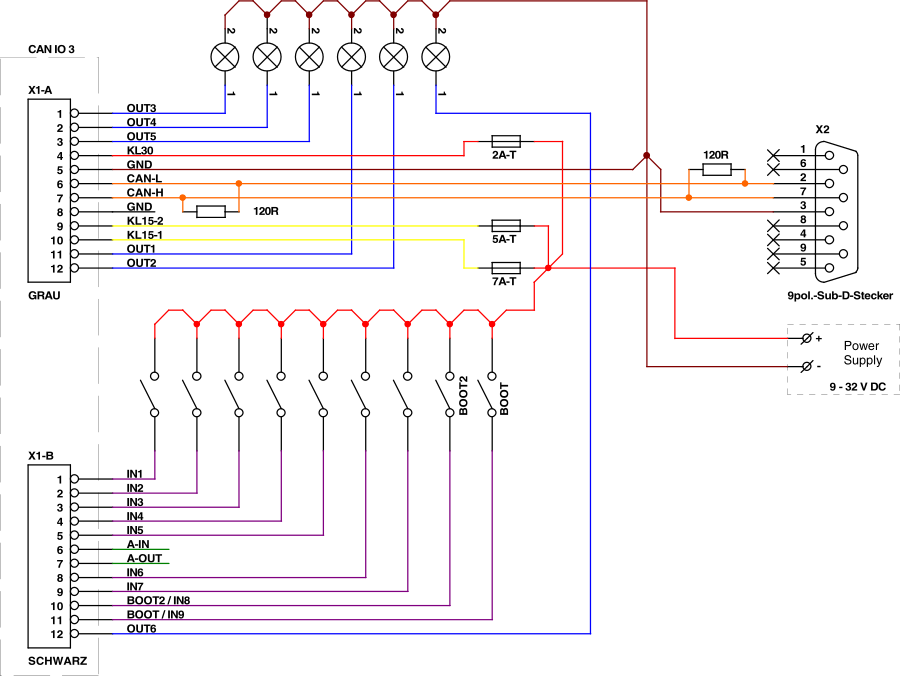
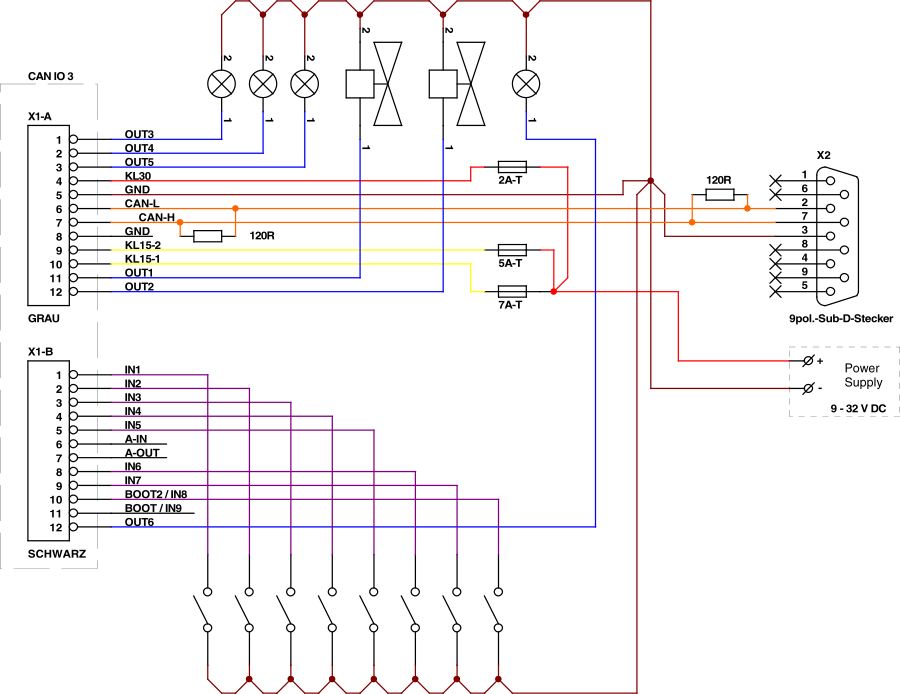
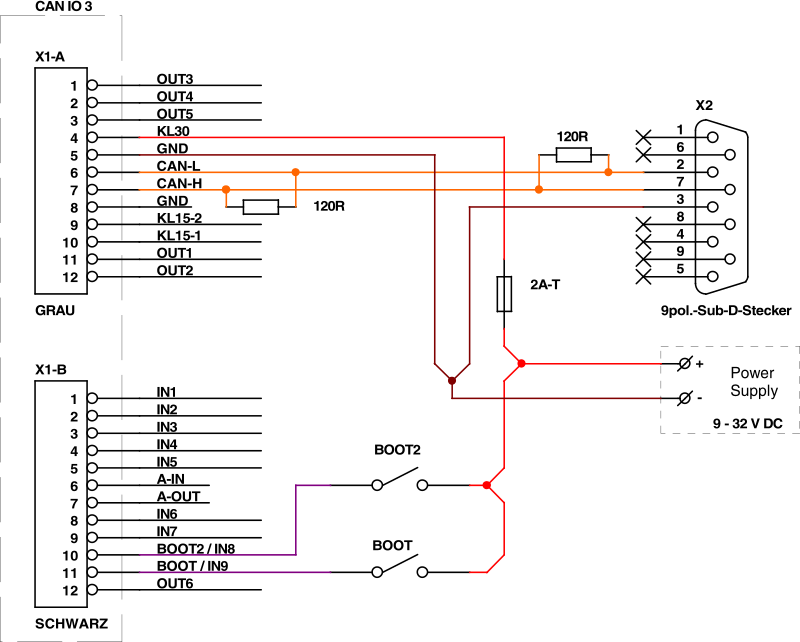
2.4 Verdrahtungsschema
Beispiel 1: Alle Digitaleingänge werden auf "+" geschaltet.
Beispiel 2: Alle Digitaleingänge werden auf "-" geschaltet.
3 Steckverbinder
|
Steckverbinder A – GRAU Hersteller: AMPHENOL Type: ATM06-12SA https://www.amphenol-industrial.de/de/ATM06-12SA/Kabeldose-12pol-A-kod-/p3275 Alternative von DEUTSCH - TE CONNECTIVITY: DTM06-12SA https://www.te.com/usa-en/product-DTM06-12SA.html |
|
|
Steckverbinder B – SCHWARZ Hersteller: AMPHENOL Type: ATM06-12SB https://www.amphenol-industrial.de/de/ATM06-12SB/Kabeldose-12pol-B-kod-/p4042 Alternative von DEUTSCH - TE CONNECTIVITY: DTM06-12SB https://www.te.com/usa-en/product-DTM06-12SB.html |

|
4 Hardware Konfiguration (Lötjumper)
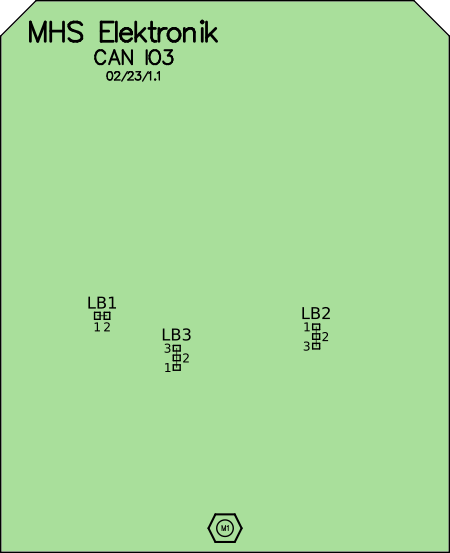 |
LB1:
LB2:
LB3:
|
5 Programmierung
5.1 Erforderliche Hardware
- Zur Kommunikation mit der Hardware ist ein USB-CAN Adapter der "Tiny-CAN XL" Serie erforderlich. Es kann ein Classical-CAN oder CAN-FD Adapter verwendet werden.
- DC Stromquelle 9-32V / 500mA.
- CAN-Bus Verkabelung
5.2 Verdrahtung der CAN IO 3 Baugruppe zur Programmierung
5.3 Installation / Vorbereitung
- Installieren Sie das Tiny-CAN Software-Paket, "TinyCan_xxx.exe" auf dem PC, wählen Sie als Installations-Typ "Vollständig".
- Folgen Sie den Installationsanweisungen.
- Verbinden Sie die Tiny-CAN Hardware mit dem PC
- Zum Abschluss installiert das Tool "Tiny-CAN Check" den FTDI Systemtreiber und überprüft die Firmware Version des USB-CAN Adapters
5.4 Die Kommunikation
Die Kommunikation erfolgt nach unten abgebildetem Schema über den CAN-Bus mit dem PC.
Die CAN IO Hardware verwendet zur Kommunikation mit dem PC 2 CAN Identifier eine Device-ID, auf dem Kommandos vom PC empfangen werden, sowie eine ACK-ID auf dem Antworten an den PC gesendet werden.
Die Konfiguration/Programmierung der Hardware erfolgt mit dem PC-Tool:
"MHS CAN Studio".
Konfiguration der Kommunikationsparameter im Auslieferungszustand (Default Setup):
| Konfiguration | Defaut Werte |
| CAN Konfiguration | Enabled* |
| CAN Übertragungsgeschwindigkeit | 500k Bit/s |
| Frame Format | Standard Identifier |
| CAN Devie ID | 0x7FE |
| CAN ACK ID | 0x7FF |
Alle Übertragungsparameter lassen sich über die PC-Software ändern.
* Es ist auch möglich, die CAN-Konfiguration zu disablen. Die Kommunikation muss dann über die BOOT-Eingänge wieder freigegeben werden.
5.5 Die BOOT Eingänge
Funktion der BOOT Eingänge:
| BOOT/IN9 | BOOT2/IN8 | |
| GND | - |
Normale Funktion der Hardware. Der Eingang "BOOT2/IN8" wird nur ausgewertet wenn der Eingang "BOOT/IN9" aktiv ist. Beim "Power Up" wird für ca. 2 Sekunden der "BOOT/IN9" Eingang ausgewertet, ist der Eingang in dieser Zeit "aktiv" so startet der Bootloader. Nach ablauf der 2 Sekunden steht "BOOT/IN2" zur freien Verfügung. |
| UBatt | GND |
Emergency Flash Mode Die "CAN IO 3" Baugruppe startet mit der im EEPROM gespeicherten Konfiguration in den Bootloader. Der CAN Bus ist jedoch aktiv unabhängig der gespeicherten Konfiguration. |
| UBatt | UBatt |
Emergency Boot Mode Die "CAN IO 3" Baugruppe startet mit der Default Konfiguration in den Bootloader. Diese Verbindung sollte exklusiv ohne andere CAN Teilnehmer am Bus hergestellt werden. |
Erfolgt im "Emergency Flash Mode/Emergency Boot Mode" innerhalb von 16 Sekunden keine Kommunikation mit dem PC löst der Bootloader einen Software Reset aus.
In den beiden "Emergency Modis" muss "MHS CAN Studio" die Kommunikation über den Menüpunkt "Device" -> "Firmware Emergency Download..." aufbauen. Neben einen Firmware Update ermöglicht der "Emergency Download" Dialog auch das löschen des EEPROMs.
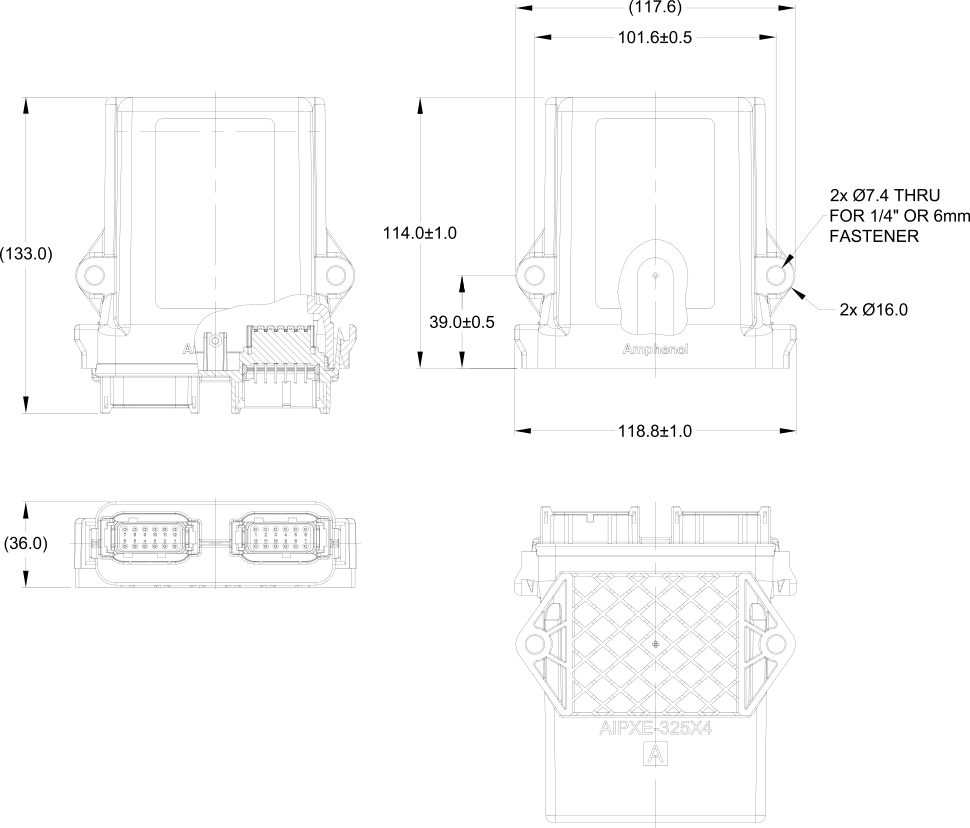
6 Montage
7 Technische Daten
| Betriebsspannung | 9 – 32V DC |
| Stromaufnahme | 13 mA bei 12 V / 11 mA bei 24 V |
| Ruhestrom (Sleep Mode) | 20 µA |
| Überspannungsschutz | > 33 V |
| CAN Interface | High Speed CAN FD (ISO 11898-2:2016) Treiber: TJA1043T |
| Übertragungsraten | 40 kBit/s – 1 MBit/s (FD: Max. 4 MBit/s) |
| Benutzerdefinierte CAN Übertragungsraten möglich | Ja |
| CAN-Spezifikation | 2.0A (11-Bit ID) und 2.0B (29-Bit ID) Classical CAN und CAN FD |
| Ein- / Ausgangskanäle (Gesamt) |
|
| Digital Eingänge IN 1 – IN9 |
|
| Digital I/O OUT1 - OUT2 | 2 Kanal High-Side Power Switch: BTT6030-2ERB |
| Digital I/O OUT3 - OUT6 | 4 Kanal High-Side Power Switch: BTS716GXUMA1 |
| Analog Eingang A-IN | 12-Bit 0 – 10 V oder 0 – 25 V |
| Analog Ausgang A-OUT | 10-Bit 0 – 10 V |
| Stecker | Amphenol ATM13-12PA-12PB-BM03 |
| Watchdog (Überwachung des Prozessors) | Ja, Software Watchdog |
| Prozessor | Microchip ATSAMC21E18A-AUT (32-Bit/48MHz, 256 kB Flash, 32 kB RAM) |
| Temperaturbereich | -20 – +85 °C |
| Abmessungen | 119 x 133 x 36 mm |
| Gewicht | 255g |
| Schutzklasse | IP65 |
| Prüfzeichen | CE |